

 Filamentos
Filamentos Resinas
Resinas
 Arduino
Arduino Raspberry Pi
Raspberry Pi Módulos y shields
Módulos y shields Módulos wireless
Módulos wireless
 Motores y actuadores
Motores y actuadores Llantas
Llantas Baterías
Baterías
 Varios
Varios

















Modulo driver ULN2003
Características:
- Chip: ULN2003N.
- Voltaje de Operación: 5V.
- Canales: 7.
- Corriente por canal: 500mA.
- Indicadores LED: 4 LEDs integrados que muestran el estado de las fases del motor.
- Conector de salida: Zócalo XH-5P para conexión directa con motores 28BYJ-48.
- Protección: Diodos flyback de cátodo común para cargas inductivas, protegiendo el circuito de picos de voltaje.


Módulo Mosfet de alta potencia DC-DC con control de FET PWM(3.3-20V)


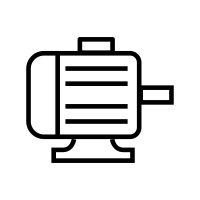
Motor con caja reductora 6-12V 280 RPM 34:1
Características:
- Relación de engranajes: 34:1
- Material del engranaje: Metal
- RPM: 281
- Voltaje de funcionamiento: 12v
- Torque: 6.5 kg.cm
- Corriente de carga: 0.45 A
- Corriente sin carga: 60 mA
- Diámetro de la caja de engranajes: 25mm
- Diámetro del motor: 25mm
- Longitud del motor: 53mm
- Diámetro del eje: 4mm
- Longitud del eje: 9.4mm
- Peso: 83.9 g


Motor con caja reductora 25GA-370 12V 30 RPM

Motor con caja reductora JGA25-370 DC12V 620RPM
Características:
Motorreductor 25GA370 de 620 RPM capaz de brindar un torque de 0.22 Kg/cm ideal para construir robots.- Material del engranaje: Metal
- RPM: 620
- Voltaje de funcionamiento: 12v
- Torque: 0.22 kg.cm
- Corriente de carga: 0.45 A
- Corriente sin carga: 60 mA
- Diámetro de la caja de engranajes: 25mm
- Diámetro del motor: 25mm
- Longitud del motor: 53mm
- Diámetro del eje: 4mm
- Longitud del eje: 9.4mm
- Peso: 83.9 g


Motor con caja reductora JGA25-370 Encoder 12V 1360RPM


Motor con caja reductora JGB37-520 DC12V 15RPM

Motor con caja reductora JGB37-520 DC12V 320RPM


Motor con caja reductora motoreductor amarillo DC3V-6V 200 RPM


Motor con caja reductora y Encoder JGA25-370 12V 35RPM
Características:
- Modelo JGA25-370 9V 35RPM.
- Velocidad: 35 RPM.
- Torque: 4 Kg/cm.
- Diámetro del eje: 4mm.
- Dimensiones: 56mmLx25mmD.
- Voltaje de alimentación del motor: 5V - 12V DC
- Voltaje de alimentación del encoder: 3.3V - 5V DC
- Consumo de corriente sin carga: 100mA
- Consumo de corriente nominal: 300mA
- Consumo de corriente eje detenido: 1000mA (Pico)
- Encoder: Hall de dos fases
- Resolución Hall: Hall x Ratio 34.02 = 341.2 PPR
- Diámetro del eje: 4 mm, eje en forma de D
- Diámetro exterior de la carcasa: 25 mm
- Dimensiones: D25mm*L71mm
- Peso: 95 gramos


Motor DC 550 DC6V 37mm
CARACTERÍSTICAS:
- Tipo: Motor DC con escobillas (Brushed)
- Modelo: 550
- Voltaje: 6V - 24V DC
- Diámetro del cuerpo: 37 mm
- Velocidad aproximada:
- 4000 – 5000 RPM a 6V
- 8000RPM a 12V
- 16000RPM a 24V
- Tipo de eje: Tipo redondo
- Eje metálico de alta resistencia
- Longitud del eje: 12 mm
- Diámetro del eje: 3,1 mm
- Diseño compacto y liviano
- Buena relación velocidad/torque
- Compatible con control PWM








