

 Filamentos
Filamentos Resinas
Resinas
 Arduino
Arduino Raspberry Pi
Raspberry Pi Módulos y shields
Módulos y shields Módulos wireless
Módulos wireless
 Motores y actuadores
Motores y actuadores Llantas
Llantas Baterías
Baterías
 Varios
Varios
















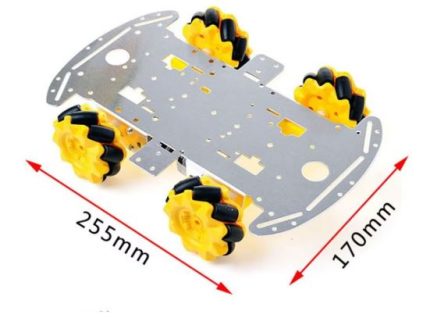
CHASSIS ALUMINIO MECANUM


Conector JST 2P Hembra 22AWG 10cm
Conector JST 2P Macho 22AWG 10cm





Conector XT30 Hembra

Conector XT30 Macho




Conector XT90 Hembra

Conector XT90 Macho


¿Aún no tiene cuenta?
Crear una cuenta





