

 Filamentos
Filamentos Resinas
Resinas
 Arduino
Arduino Raspberry Pi
Raspberry Pi Módulos y shields
Módulos y shields Módulos wireless
Módulos wireless
 Motores y actuadores
Motores y actuadores Llantas
Llantas Baterías
Baterías
 Varios
Varios







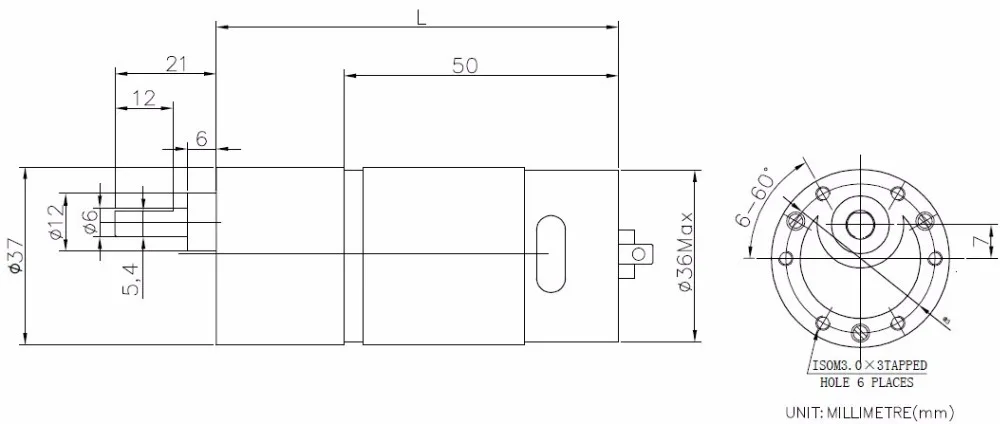
Motor con caja reductora y Encoder JGB37-545-CE 12V 110RPM
$46.45
Características:
- Corriente sin carga: 200mA
- Máxima corriente soportada bajo carga: 3A
- Velocidad sin carga: 37 RPM (37 rpm)
- Velocidad máxima de resistencia bajo carga: 30 RPM (30 rpm)
- Momento de torsión nominal: 32 KG.CM
- Momento máximo de par: 90KG.CM
- Longitud de la caja de cambios L: 26,5 mm
- Número de pulsos del codificador por canal por revolución del husillo: 11 x 168 = 1848 pulsos.
Sin existencias
El servomotor de CC con motorreductor de CC JGB37-545 está integrado con un encoder AB de dos canales para ayudar a leer y controlar con precisión la posición y la rotación del motor en aplicaciones que requieren alta precisión.
JGB37-545 DC tiene una estructura metálica para mayor durabilidad y alta estabilidad, utilizado en modelos de robots, vehículos, barcos, su caja reductora una relación de transmisión que facilita la elección entre torque y velocidad (cuanto mayor es el torque, menor es la velocidad y viceversa), el motor utiliza materiales de alta calidad (núcleo de alambre de cobre puro, lámina de acero 407, fuerte imán magnético,…) para una resistencia y durabilidad (con núcleo de alambre de aluminio, imán magnético débil).
Tenga en cuenta que antes de usar, debe agregar más aceite o lubricante a la caja de cambios del motor para ayudar a que el motor funcione de manera más suave y duradera porque es posible que durante el almacenamiento el motor esté seco.
Especificaciones:
- Voltaje de uso: 12VDC
- Diámetro: 37 mm
- Codificador: sensor de campo magnético Hall, tiene 2 canales AB diferentes para ayudar a determinar la dirección de rotación y la velocidad del motor, el codificador de disco devuelve 11 pulsos/1 canal/1 revolución (si mide las señales de ambos canales al mismo tiempo, obtendrá un total de 22 pulsos / 1 revolución del Encoder).
- Cómo calcular el número de pulsos de cada canal por 1 revolución del husillo del motor = Relación de transmisión x número de pulsos del Encoder, por ejemplo la relación 150:1, el número de pulsos que devuelve el Encoder por 1 revolución del husillo del motor será sea 11 x 150 = 1650 pulsos / 1 canal.
- Voltaje para la operación del codificador: 3.3 ~ 5 V CC, tenga en cuenta que la sobretensión o la inversa quemarán el codificador inmediatamente.
CARACTERISTICAS:
- Corriente sin carga: 200mA
- Máxima corriente soportada bajo carga: 3A
- Velocidad sin carga: 37 RPM (37 rpm)
- Velocidad máxima de resistencia bajo carga: 30 RPM (30 rpm)
- Momento de torsión nominal: 32 KG.CM
- Momento máximo de par: 90KG.CM
- Longitud de la caja de cambios L: 26,5 mm
- Número de pulsos del codificador por canal por revolución del husillo: 11 x 168 = 1848 pulsos.
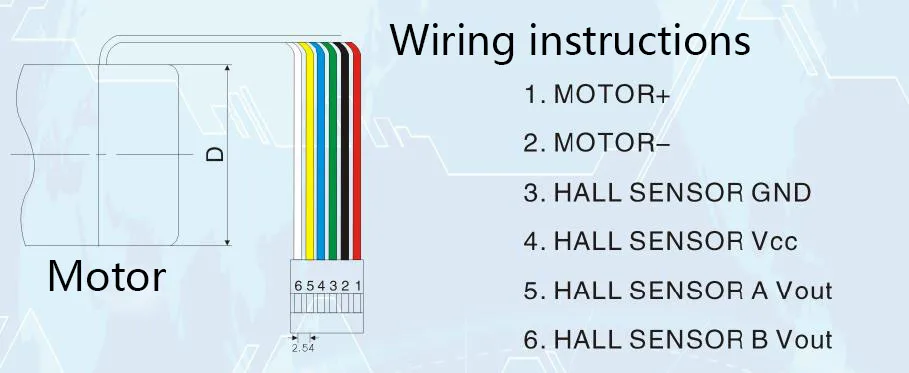
PINES:
- Rojo: Motor +
- Negro: Motor-
- Verde: HALL SENSOR GND
- Azul: SENSOR HALL VCC
- Amarillo: SENSOR HALL A VOUT
- Blanco: SENSOR HALL B VOUT
Descargas:
- Tutorial: Arduino y encoder de cuadratura por interrupciones
- Tutorial: Interrupciones en Arduino
- Tutorial: Arduino y encoders
- Tutorial: Arduino y encoders alt
- Tutorial: Arduino y encoders (Robuin)
- Video: Arduino + Encoder digital optico (HomoFaciens)
- Video: Como usar Encoders con Arduino (Sparkfun)
- Video: Interrupciones en Arduino (Sparkfun)
- Proyecto: Sistema de Control PI Motor con Encoder Labview/Arduino
| Peso | 0.090 kg |
|---|---|
| Dimensiones | 5.3 × 2.5 × 2.5 cm |

Productos relacionados


Brushless Motor XXD A2212 2200KV
Características
- Modelo: A2212/6T
- Motor KV (RPM / V): KV2200
- RPM/V: 2200 KV (2200 revoluciones por minuto por cada volt suministrado)
- Corriente: 12A/60s
- Eficiencia máxima: 80%
- Corriente máxima de eficiencia: 4 ~ 10A (> 75%)
- Corriente sin carga: 10V/0.5A
- Tamaño de motor (con eje): 27.5 mm x 38.5 mm
- Diámetro del eje: 3.17mm (3.2mm)
- Longitud del diámetro: 11.5mm
- Peso de motor: 47 g



Motor con caja reductora 6-12V 280 RPM 34:1
Características:
- Relación de engranajes: 34:1
- Material del engranaje: Metal
- RPM: 281
- Voltaje de funcionamiento: 12v
- Torque: 6.5 kg.cm
- Corriente de carga: 0.45 A
- Corriente sin carga: 60 mA
- Diámetro de la caja de engranajes: 25mm
- Diámetro del motor: 25mm
- Longitud del motor: 53mm
- Diámetro del eje: 4mm
- Longitud del eje: 9.4mm
- Peso: 83.9 g

Motor con caja reductora JGA25-370 DC12V 620RPM
Características:
Motorreductor 25GA370 de 620 RPM capaz de brindar un torque de 0.22 Kg/cm ideal para construir robots.
- Material del engranaje: Metal
- RPM: 620
- Voltaje de funcionamiento: 12v
- Torque: 0.22 kg.cm
- Corriente de carga: 0.45 A
- Corriente sin carga: 60 mA
- Diámetro de la caja de engranajes: 25mm
- Diámetro del motor: 25mm
- Longitud del motor: 53mm
- Diámetro del eje: 4mm
- Longitud del eje: 9.4mm
- Peso: 83.9 g








Ventilador DC 5010 12V 50x50x10mm 0.18A
CARACTERÍSTICAS
- Tipo: 5010 ventilador
- Voltaje de Operación: 12V DC
- Corriente de Operación: 0.18A
- Velocidad: 4500 ± 10% RPM
- Ruido: 18 dBA
- Tipo de motor: brushless
- Velocidad de Viento: 1.5 M/s
- Volúmen de Aire: 15.5 CFM
- Rodamiento: oil bearing
- Vida útil: 30000 hours
- Largo de cable: 27cm aprox.
- Dimensiones: 50mm x 50mm x 10mm(L x W x H)






