

 Filamentos
Filamentos Resinas
Resinas
 Arduino
Arduino Raspberry Pi
Raspberry Pi Módulos y shields
Módulos y shields Módulos wireless
Módulos wireless
 Motores y actuadores
Motores y actuadores Llantas
Llantas Baterías
Baterías
 Varios
Varios













TB6612FNG Dual Motor Driver
$9.25
Características y especificaciones
- Controlador de motor de doble puente H: puede impulsar dos motores de CC o un motor paso a paso bipolar
- Voltaje de motor recomendado (VMOT): 4,5 V a 13,5 V (puede operar hasta 2,5 V con rendimiento reducido)
- Tensión lógica (VCC): 2,7 V a 5,5 V
- Corriente de salida máxima: 3 A por canal
- Corriente de salida continua: 1 A por canal (se puede conectar en paralelo para entregar 2 A continuos)
- Frecuencia máxima PWM: 100 kHz
- Circuito de apagado térmico incorporado
- Condensadores de filtrado en ambas líneas de alimentación
- Protección de potencia inversa en la alimentación del motor
Esta pequeña placa es una manera fácil de usar el controlador de motor dual TB6612FNG de Toshiba, que puede controlar de forma independiente dos motores de CC bidireccionales o un motor paso a paso bipolar. Un voltaje de motor recomendado de 4,5 V a 13,5 V y una salida de corriente máxima de 3 A por canal (1 A continuo) hacen de este un excelente controlador de motor para motores de baja potencia.
El TB6612FNG es un excelente controlador de motor dual que es perfecto para interconectar dos pequeños motores de CC, como nuestros micromotorreductores de metal , a un microcontrolador, y también se puede usar para controlar un solo motor paso a paso bipolar . Los puentes H basados en MOSFET son mucho más eficientes que los puentes H basados en BJT utilizados en controladores más antiguos como el L298N y el LB1836M de Sanyo ., lo que permite que se suministre más corriente a los motores y que se extraiga menos del suministro lógico (el LB1836 todavía tiene el ritmo del TB6612 para aplicaciones de muy bajo voltaje). Nuestra pequeña placa de conexión le brinda acceso directo a todas las características del TB6612FNG y agrega capacitores de fuente de alimentación y protección de batería inversa en el suministro del motor (nota: no hay protección inversa en la conexión Vcc).
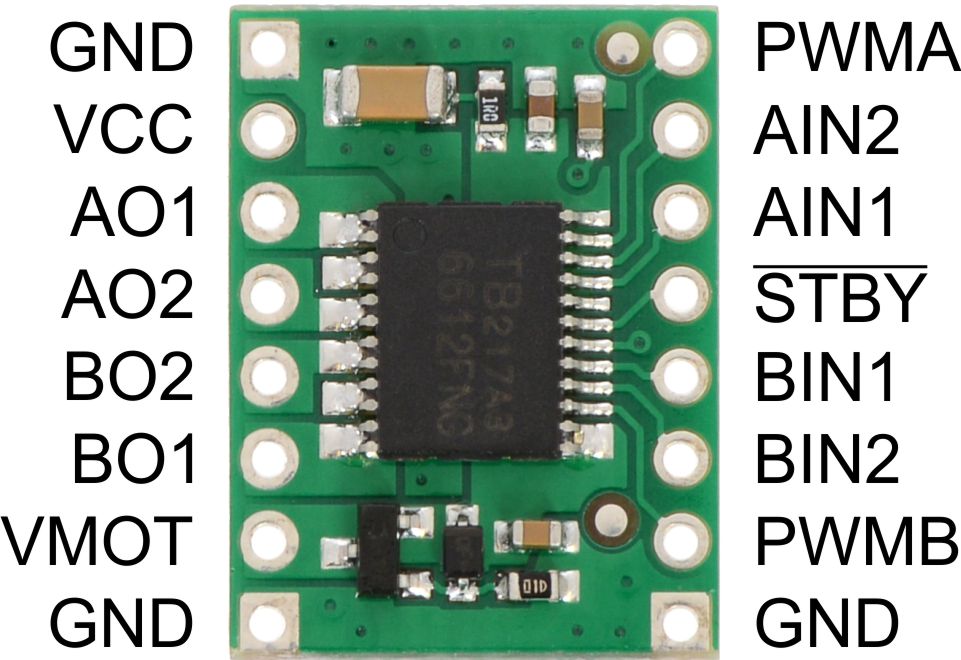 |
En una aplicación típica, las conexiones de alimentación se realizan en un lado de la placa y las conexiones de control en el otro. Todas las entradas de control se reducen internamente. Cada uno de los dos canales del motor tiene dos pines de control de dirección y un pin de control de velocidad que acepta una entrada PWM con una frecuencia de hasta 100 kHz. El pin STBY debe estar alto para sacar al controlador del modo de espera.
 |
| Soporte de controlador de motor dual TB6612FNG en una placa de pruebas. |
|---|
La distancia entre las filas de encabezado en la placa de circuito impreso es 0,1″ más pequeña que un paquete DIP estándar de 0,6″ (por ejemplo, el Baby Orangutan ), pero el espacio entre pines permite que encaje convenientemente en placas de prueba y perforadas de 0,1″.
Para un controlador de motor más avanzado basado en este controlador, considere el controlador de motor serie dual qik 2s9v1 . Para un controlador de robot basado en este controlador, considere el Baby Orangutan, el Orangutan SV-328 , el Orangutan SVP-1284 y el robot 3pi , que conectan el TB6612 a un microcontrolador AVR programable por el usuario. Para un controlador de motor similar que sea fácil de usar con Arduinos, considere nuestro protector de controlador de motor dual DRV8835 , y para un controlador de motor similar con un voltaje de funcionamiento máximo mucho más alto, considere nuestro soporte de controlador de motor dual A4990 .
Características y especificaciones
- Controlador de motor de doble puente H: puede impulsar dos motores de CC o un motor paso a paso bipolar
- Voltaje de motor recomendado (VMOT): 4,5 V a 13,5 V (puede operar hasta 2,5 V con rendimiento reducido)
- Tensión lógica (VCC): 2,7 V a 5,5 V
- Corriente de salida máxima: 3 A por canal
- Corriente de salida continua: 1 A por canal (se puede conectar en paralelo para entregar 2 A continuos)
- Frecuencia máxima PWM: 100 kHz
- Circuito de apagado térmico incorporado
- Condensadores de filtrado en ambas líneas de alimentación
- Protección de potencia inversa en la alimentación del motor
Consideraciones de disipación de energía en el mundo real
El controlador de motor TB6612 que se usa en la placa portadora tiene una clasificación de corriente máxima de 3 A por canal. Las clasificaciones máximas son para transitorios rápidos (por ejemplo, cuando un motor se enciende por primera vez), y la clasificación continua de 1 A depende de varias condiciones, como la temperatura ambiente. La corriente real que puede entregar dependerá de qué tan bien pueda mantener frío el controlador del motor. La placa de circuito impreso del portador está diseñada para sacar el calor del chip del controlador del motor, pero el rendimiento se puede mejorar agregando un disipador de calor.
Este producto puede calentarse lo suficiente como para quemarte mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
Espadines incluidos
Se incluye una tira de encabezado macho separable de 0,1″ de 1 × 16 pines con el soporte del controlador de motor TB6612FNG. Esta tira se puede soldar opcionalmente a la placa de soporte para que se pueda usar con placas perforadas, placas de pruebas sin soldadura o conectores hembra de 0,1″ . (Los encabezados pueden enviarse como dos piezas de 1 × 8 o como una sola pieza de 1 × 16 que se puede partir por la mitad).
 |
Diagrama esquemático
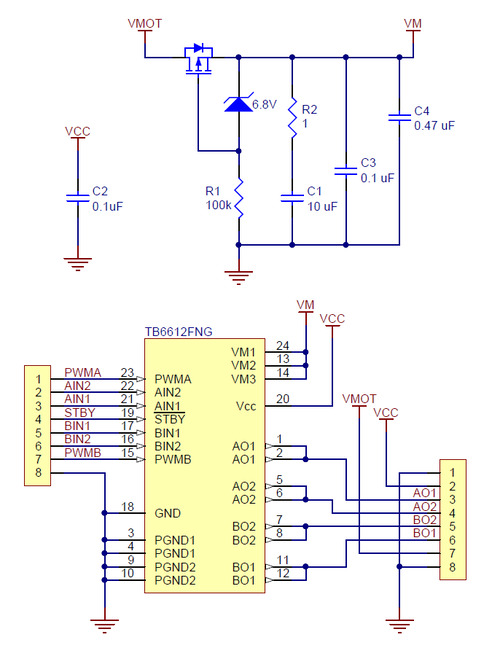 |
Descargas
| Marcas | Pololu |
|---|

Productos relacionados


ADS1115 Conversor Analogo a digital
Características
- Voltaje de alimentación: 2.0V a 5.5V
- Consumo de corriente: 150uA
- Tasa de datos programable: 8SPS a 860SPS (SPS: muestras por segundo)
- Interfaz I2C, direcciones seleccionables por pines
- Cuatro entradas independientes o dos diferenciables.
- Comparador programable
- Esta placa / chip utiliza direcciones I2C de 7 bits entre 0x48-0x4B, seleccionable con el pin de entrada ADDR


BTS7960 Driver para motor DC 43A
Características:
- Modelo: BTS7960
- Chip: Buffer Schmitt-trigger 74AHC244
- Voltaje de operación Motor: 5.5~27V
- Voltaje de Control: 5V
- Corriente de operación máxima: 43A
- Protección: Sobre corriente
- Baja corriente de reposo: 7uA a 25°C
- Entradas lógicas: Si
- Tasa de respuesta ajustable: EMI
- Señal PWM: Dos canales
- Frecuencia de reloj: 25KHz
- Dimensiones: 5.5x5x4cm




Driver A4988 para motor paso a paso
Características
- Voltaje de operación de 8 a 35 volts
- Máxima corriente por bobina: 2 Amperes
- Capacidad de “micro-stepping”
- Interfaz simple de 2 pines con el microcontrolador: Pines STEP y DIRECTION
- 5 Diferentes resoluciones: Paso completo, 1/2 de paso, 1/4 de paso, 1/8 de paso y 1/16 de paso.
- Control de corriente ajustable mediante un potenciómetro en el módulo
- Protección por sobre-temperatura, bajo voltaje, corto y otras condiciones de error comunes





Motor Shield Driver L293D
Características:
- 2 circuitos integrados L293D (4 puentes H completos)
- Protección contra sobrecarga térmica
- Diodos de protección contra voltajes inversos de las cargas inductivas
- 4 canales para controlar cargas inductivas (motores, relés, etc)
- Podemos controlar tanto la velocidad como la dirección de giro de los motores
- Control de velocidad con resolución de 8 bits
- Controlador para 2 servos pequeños
- Corriente máxima en cada salida: 0.6A








